The Lightweight Observation Robot for Irregular Slopes (LORIS) is a quadrupedal climbing robot that ascends vertical cliff faces using passive microspine grippers. Microspines are sharp hooks embedded in flexures that catch on small bumps and pits in the rock. By generating internal forces between opposing grippers, LORIS can ensure a secure grasp even on highly irregular surfaces. Potential applications of this work include planetary exploration of steep, rocky slopes and subsurface lava tubes on the Moon and Mars. The climbing robot autonomy code developed for LORIS is available in the open-source Climb-SDK codebase. This work was supported by the NASA Space Technology Graduate Research Opportunities (NSTGRO) fellowship.
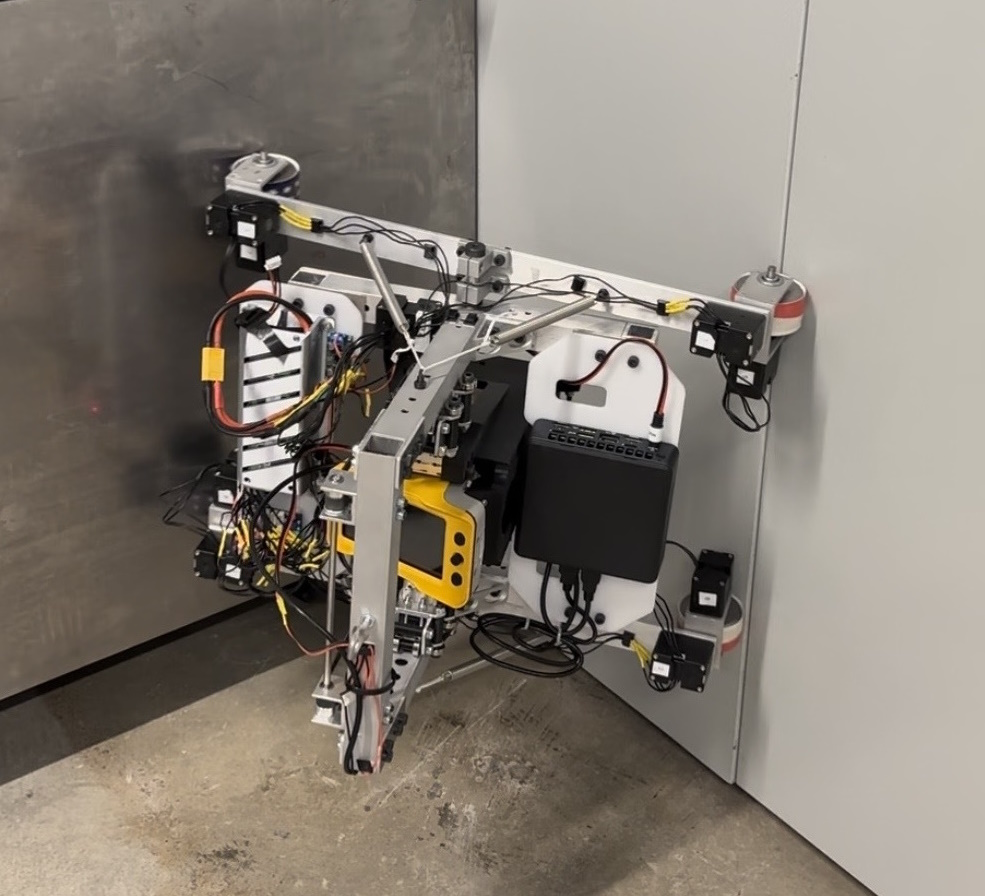
Sally is a magnetic wall-climbing robot developed to automate the inspection of steel structures such as oil tankers, which currently requires hazardous human labor and the construction of costly scaffolding. Passive magnetic wheels with independent steering and a rocker suspension enable Sally to maneuver in confined spaces, transition between adjacent surfaces (e.g. floor, wall, and ceiling), traverse obstacles, and hold position without drawing power. Sally carries a portable X-ray florescence (pXRF) sensor to detect contaminants like lead and mercury.
Vertical Climbing with a Snake Robot for Exploration of Icy Moons
Summer 2023,NASA Jet Propulsion Laboratory
The Exobiology Extant Life Surveyor (EELS) is a snake-like robot designed to descend through narrow shafts in the ice crust of Saturn's moon Enceladus and explore the liquid ocean underneath. EELS is equipped with rotating ice screws that can cut into the sides of the shaft to resist gravitational and plume forces. As part of the EELS autonomy team I worked on a unified control framework to maintain contact with the uneven shaft walls and regulate contact forces while following a desired trajectory.
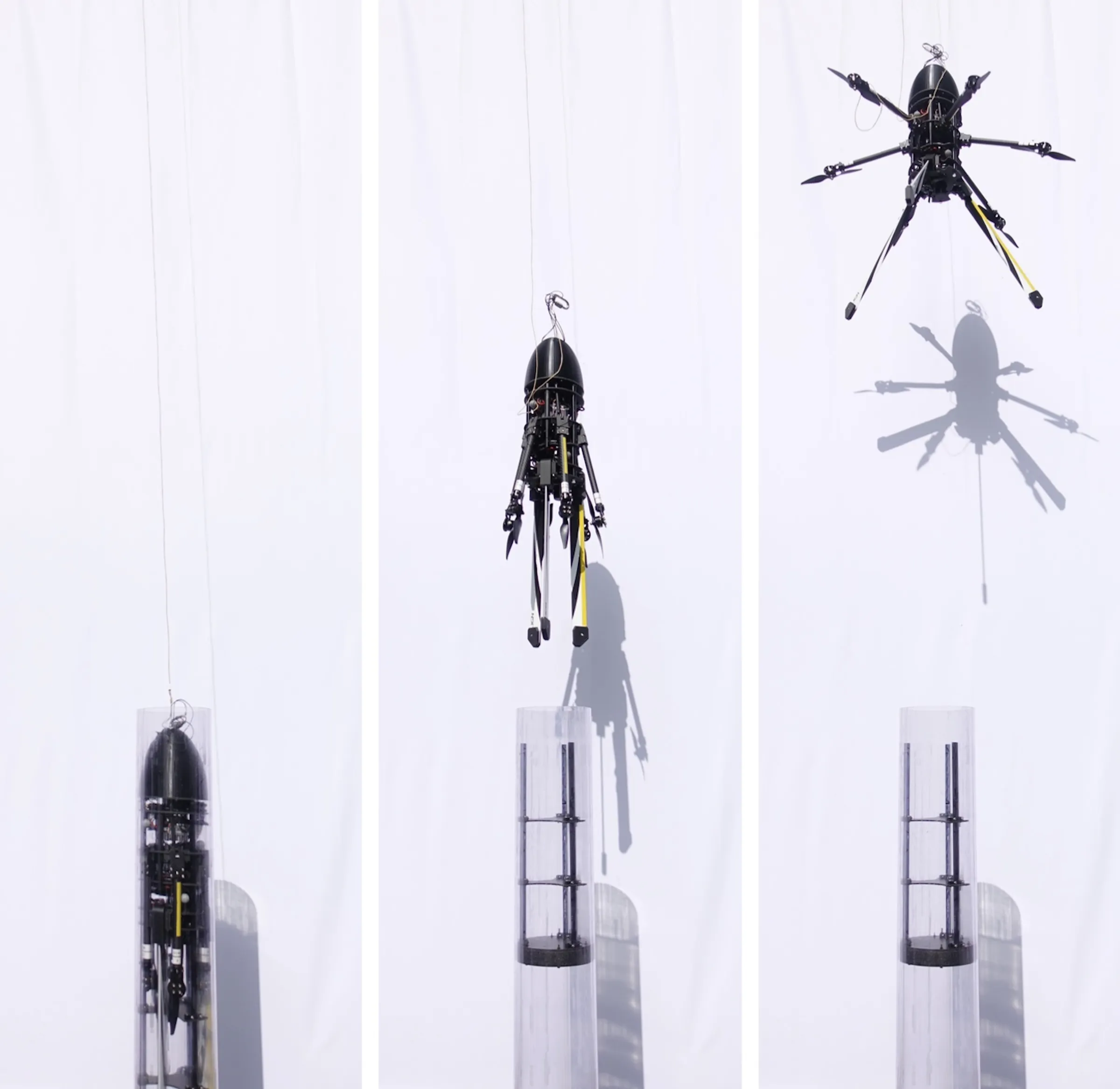
The Streamlined Quick Unfolding Investigation Drone (SQUID) is a novel folding hexacopter capable of ballistic deployment from a launch tube. Applications of this technology include the safe deployment of aerial scouts from a rover or lander on Mars and Titan, as well as rapid disaster response on Earth. In summer 2018 I developed a quick-release mechanism for the initial quadcopter-scale version of SQUID, and the following summer I led the design and fabrication of the full-scale hexacopter. Key challenges on this project included extreme launch loads, tight space constraints, vibration mitigation, and electrical integration.
Chris Lee's Research Group,Olin College of Engineering
This passive rotorcraft landing gear system is inspired by a bird's talons, with tendons that contract as the vehicle sets down to close the feet around a perch. My role in the project was the development of a hybrid empirical-computational model to simulate the system as it grasps objects of various cross-sectional shapes and sizes. The results are used to quantitatively characterize the grasp and optimize design parameters for future iterations of the mechanism.
This research project aims to develop a folding autonomous hexapod rover for exploring rocky environments such as the surface of Mars or an asteroid. The hexapod features bio-inspired feet with built-in contact sensing and an integrated LIDAR sensor for obstacle avoidance. An adaptive gait enables the robot to maintain stability on uneven and sloped terrain.
Control of a Multirotor Swarm Through Guided Autonomy
Olin Aerial Robotics Team,Olin College of Engineering
In Fall 2017, we launched a new student team at Olin to compete in the International Aerial Robotics Competition (IARC), which challenges participants to complete mission scenarios involving open research problems like landing on ground robots (Mission 7) or swarm coordination and human-robot interaction (Mission 8). I worked on several aspects of our system, including controller architecture, GPS-denied localization, gesture detection, voice control, and obstacle avoidance. We ultimately demonstrated our system at the 2019 IARC Symposium on Indoor Flight Issues, where we received the award for Best Presentation.