
Robotic Climbing
Microspine gripper design, force control, and footstep planning for climbing on vertical cliff faces
I am interested in the design, analysis, and control of novel robotic systems for locomotion and manipulation.
Microspine gripper design, force control, and footstep planning for climbing on vertical cliff faces

Adaptive gaits and bio-inspired foot design for legged locomotion on uneven and sloped terrain

Modeling of bird-inspired rotorcraft landing gear for passive perching on a wide range of structures

Guided autonomy and coordinated obstacle avoidance for a swarm of multirotors
A wide range of both engineering and non-technical projects created during courses, at hackathons, or just for fun
A space-themed social deduction card game that was manufactured and shipped to backers after a successful Kickstarter campaign

A collection of fun and innovative games that were each created from scratch within a tight time limit as part of a game jam competition

A VR game that placed 2nd at Hackholyoke 2016, with a custom controller that tracks player movements using an accelerometer
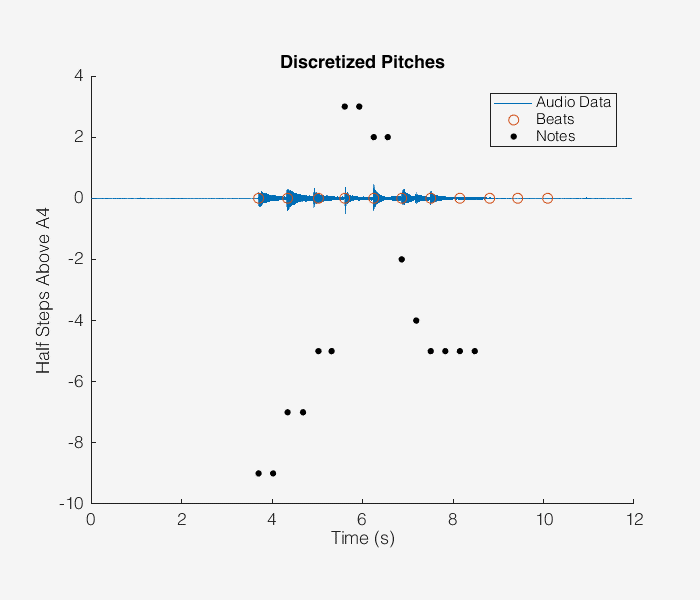
A program that combines audio of a song and accelerometer data from foot-tapping to generate sheet music using frequency analysis

A squid-inspired aquatic robot capable of autonomous navigation between color-coded targets using actuated fins and jets

A mechanical music machine that plays songs stored in memory by routing marbles to hit pipes of different lengths